Project: magnecko

Our Vision
Specs
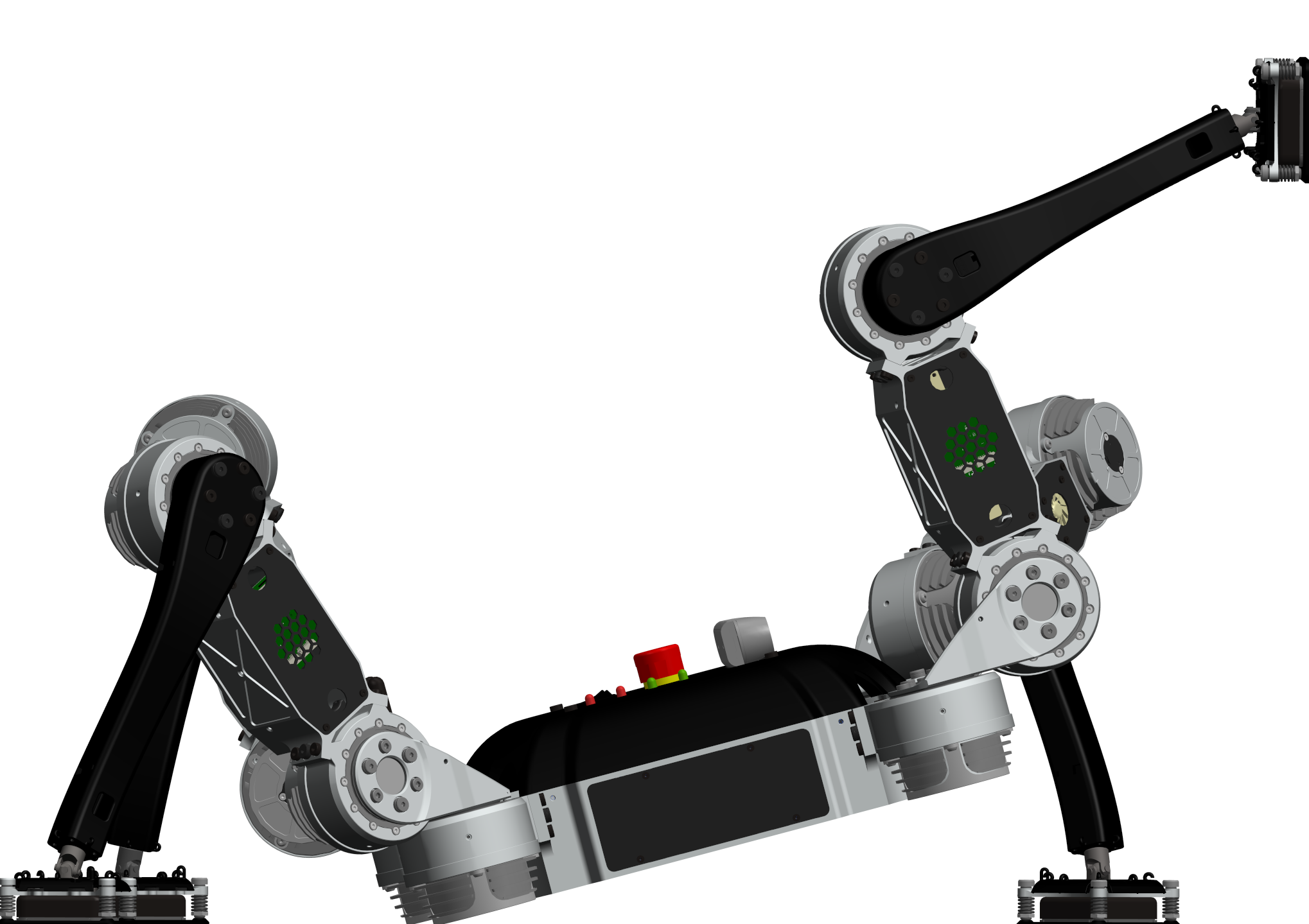
magnecko
magnecko has four identical legs. Their symmetrical construction allows it to have no predefined direction of movement. Thus, magnecko is very flexible and can avoid obstacles in any conceivable direction. Thanks to the unusual arrangement of the joints, the robot has enormous freedom of movement.
Insect Style
Thanks to the insect-like arrangement of the joints, the robot has great freedom of movement and can move its body independently of its feet. Since we want to not only walk on the ground but also climb other structures, these characteristics are very helpful.
3 Degrees of Freedom per Leg
Movement
For the movement of the legs, custom-developed actuators are located in each joint of the hip and knee, which are perfectly optimized for our use case. They consist of an electric motor and a gearbox, which amplifies the torque of the motor, thus giving magnecko enough power to climb.
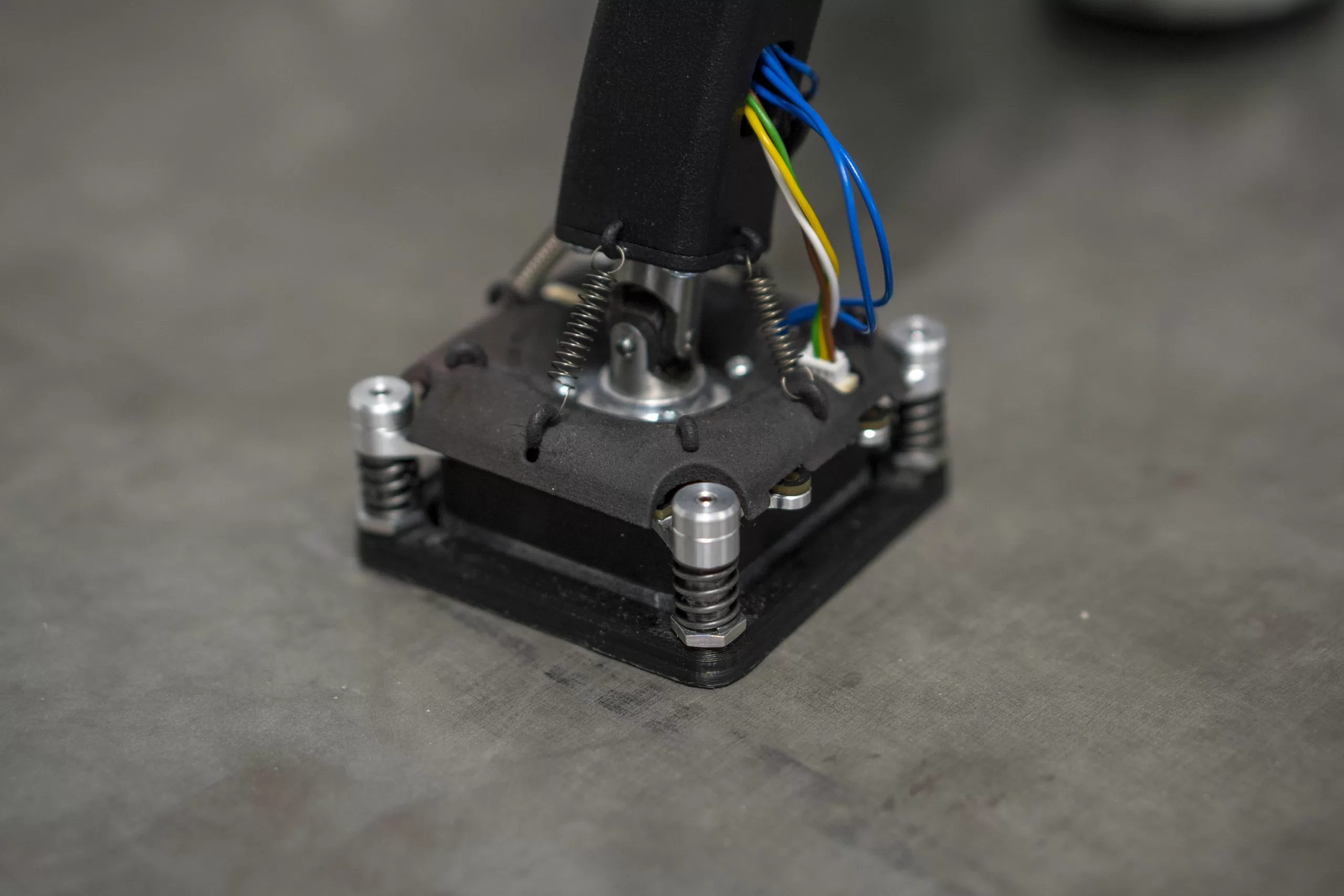
Adhesion
To ensure that magnecko, with its 11kg, remains adhered in all possible orientations, it has magnetic feet. These allow the robot to easily stick to walls and ceilings.
Team

Timo Eugster
Mechanical Design

Stefan Leuthard
Control System Engineer

Michael Fritsche
Control System Engineer

Nicolas Hürlimann
Electrical Engineer

Riccardo Feingold
Control System Engineer

Nicolas Faesch
Mechanical Design

Elena Morbach
Electrical Engineer

Connor Flynn
Mechanical Design
Sponsors
💎 Diamond




🥇 Gold

🥈 Silver


🥉 Bronze




🙏🏻 Patron